“Er vindt een ongelooflijke verandering in je leven plaats als je besluit de controle over te nemen over datgene waar je macht over hebt, in plaats van te verlangen naar controle over datgene waar je geen controle over hebt.”-Steve Maraboli
Rutuja Kawade, een ML-ingenieur bij Omdena | AI voor sociaal welzijn weerspiegelt dat medium.com over haar ervaringen met het werken aan de iRAP Omdena-uitdaging in de afgelopen maanden: van dataverzameling tot EDA, tot etikettering, tot het bouwen van geavanceerde ML-modellen voor het beoordelen van de verkeersveiligheid (met enkele van 's werelds beste datawetenschappers, data-ingenieurs en ML-experts):
De innovatieve iRAP Omdena-uitdaging vond plaats gedurende 8 weken vanaf november 2020 en crowdsourcede meer dan 50 AI- en machine learning-ingenieurs om een oplossing te vinden voor de versnelde en intelligente verzameling en codering van wegattribuutgegevens (AiRAP) om levens te redden.
Als niet-gegradueerde student is het voor mij altijd een uitdaging geweest om academici te beheren met een aantal extra co-curriculaire activiteiten. Ik heb altijd geprobeerd het beste uit mijn vrije tijd te halen. Deze lockdown was geen uitzondering. Van het leren en verkennen van Machine Learning tot het selecteren als Junior ML Engineer voor een Computer Vision Project bij Omdena en het opklimmen tot Machine Learning Engineer tegen het einde van twee maanden was super opmerkelijk.
Samen levens redden
De afgelopen twee maanden hadden niet productiever kunnen zijn dan samenwerken aan een verkeersveiligheidsproject met als motto #, samen levens redden en samenwerken met een aantal van de beste ML-ingenieurs over de hele wereld. Ik ben blij dat ik het project AI voor verkeersveiligheid heb afgerond Omdena in samenwerking met iRAP. Het project startte medio november 2020 met 50 changemakers over de hele wereld. 50 #AI-changemakers uit 24 landen (33% vrouwen) verenigen zich om de RoadSafety Challenge af te trappen met iRAP.
De probleemstelling was het voorkomen van verkeersongevallen en het redden van levens. De uitdaging zelf fascineerde mij enorm, dus ik stond te popelen om aan de slag te gaan.
Ons probleem was om het ongevalsrisico op elke weg ter wereld voor elk type weggebruiker in kaart te brengen; identificeer het ontwerp, de snelheid en het volume van de infrastructuur die van invloed zijn op dat risico, en produceer de gegevens regelmatig om de zichtbaarheid, verantwoordelijkheid, actie en het volgen van prestaties te stimuleren.

LiDAR-afbeelding van Road (Bron: TomTom Dataset)
Het project richtte zich op de analyse van gegevens en de mogelijkheden ervan, het extraheren van wegkenmerken uit bestaande gegevens en het produceren ervan Risicokaarten van de historische ongevallen, afgelegde ongevallen per weggebruiker, de veiligheidsprestaties in kaart brengen en aanpakken Sterbeoordeling volgens iRAP-normen. Mijn werk omvatte het bouwen van objectdetectiemodellen met YOLO v3, open CV, Resnet en COCO.
Van het verzamelen van de gegevens tot het labelen
Ik moest omgaan met de nauwkeurigheid van elk van deze en hoe we deze kunnen optimaliseren zodat deze goed bij onze gegevens past. Ik heb ook gewerkt met panoramische beelden uit de TomTom gegevensset. TomTom Historical Traffic Stats is een selfserviceproduct dat historische locatiegegevens analyseert en verkeersinzichten biedt over snelheid, reistijd en steekproefomvang op het wegennetwerk. Het bevatte feitelijk alle echte beelden van de weg en het verkeer.
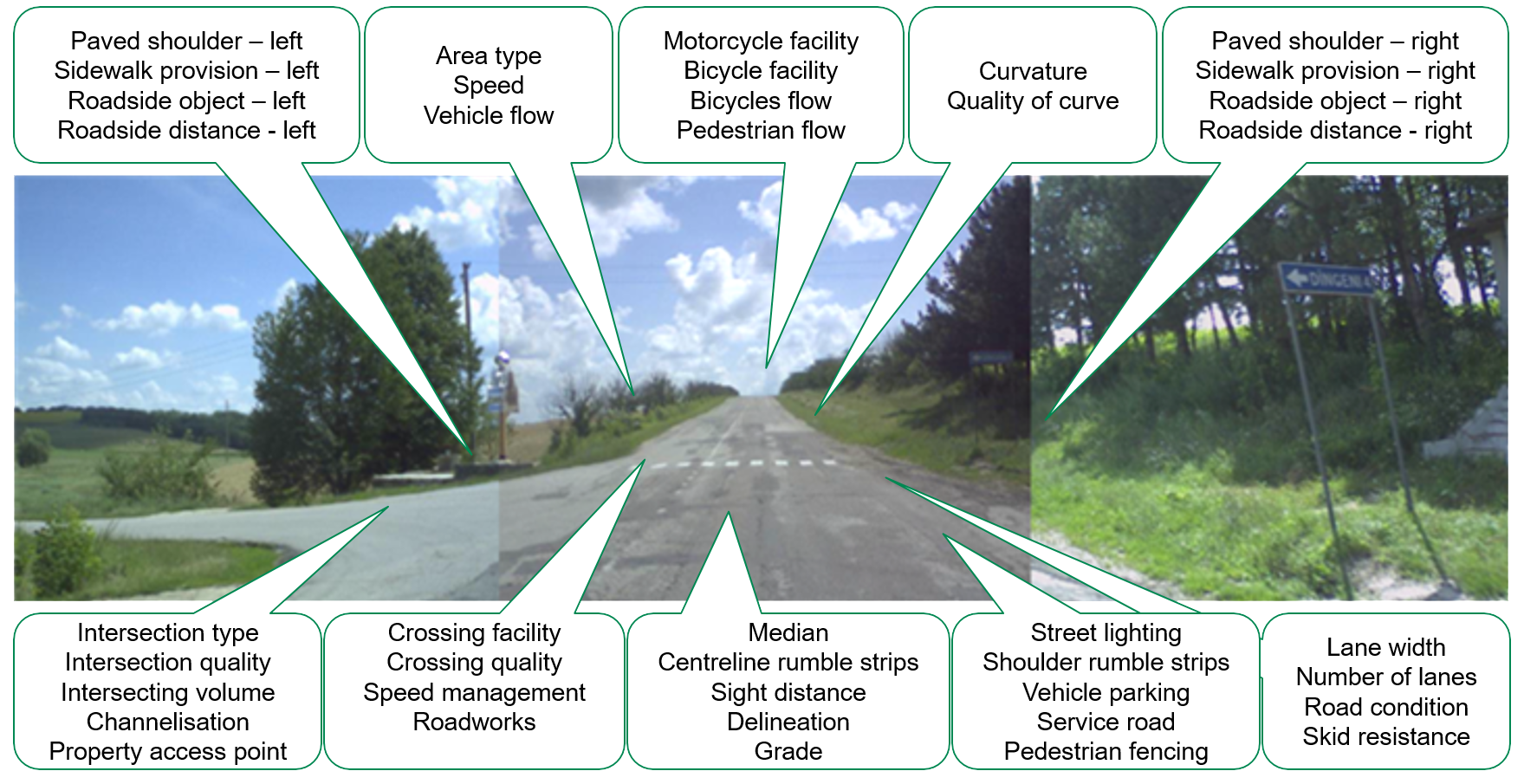
Eén van de afbeeldingen is hier toegevoegd. We hebben voor deze dataset gekozen omdat deze beschikt over LiDAR (Light Detection and Ranging) en panoramische beelden die ons hebben geholpen de kenmerken van de weg te analyseren en ons vertrouwd te maken met verschillende aspecten van de weg waarmee iRAP rekening houdt. De TomTom-dataset was niet gelabeld en ons team heeft deze gelabeld volgens de iRAP-standaarden met ongeveer 3.964 afbeeldingen (10,9 GB). Het bevatte panoramische beelden voor ESP (Spain Road Images) en MEX (Mexico Road Images).

Panoramisch beeld (bron: TomTom Dataset)
De eerste en belangrijkste uitdaging met TomTom-gegevens was voor mij het omgaan met en omgaan met de big data met behulp van Amazon S3, wat ik nog niet eerder had gedaan. Ik kreeg goede ondersteuning van de gemeenschap als en wanneer ik met een dergelijk probleem vastzat. Het beste was dat een aantal van de andere medewerkers op elk moment van de dag actief waren op het gebied van slack en met wie ik contact kon opnemen.
Samen met het team heb ik de afbeeldingen handmatig geannoteerd en we hebben een labeltool (labelImg) gebruikt. We hebben het annoteren van bijna 2K-beelden voltooid die zijn vastgelegd door TomTom. Ook kreeg ik de kans om aan de pijplijn van het project te werken met behulp van Spell ML.
Spell ML is een platform voor het bouwen en beheren van machine learning-projecten. Het wordt over het algemeen gebruikt voor het pipelinen van machine learning-projecten. Ons team gebruikte deze software om het werk van elk individu of een kleine groep in een pijplijn te brengen, zodat het tot het hele eindproduct kon komen.

De panoramische afbeeldingen labelen met behulp van LabelImg-software
De gemeenschap, de hulp en de sprintoproepen
We hadden ook een paar code-sprints en data-sprints waarbij alle medewerkers die aan hetzelfde onderdeel werkten een interactieve sessie hielden waarin twijfels werden opgelost, elkaar werden geholpen en zelfs een gemeenschap werd opgebouwd.
Ik zou vooral de annotatie-sprint willen noemen, waarbij alle medewerkers die bij deze taak betrokken waren, meededen en het labelen bespraken, de software die wordt gebruikt voor het annoteren van afbeeldingen. We verdeelden de afbeeldingen onder elkaar en gingen door met het annoteren ervan. Deze sprint duurde bijna 8 à 10 uur, waarbij iedereen vrij was om aan te sluiten en te vertrekken volgens zijn tijdzone. We hadden ook verschillende andere bijeenkomsten waar iedereen zijn of haar werkstatus, zijn twijfels en moeilijkheden waar hij op enig moment mee te maken kreeg, deelde en elkaar met zijn volledige kennis hielp.
Terecht wordt gezegd door Helen Keller: “Alleen kunnen we zo weinig doen; samen kunnen we zoveel.”
Ik heb een geweldige leer- en werkervaring gehad met alle geweldige changemakers die hun uiterste best hebben gedaan om dit voor elkaar te krijgen. Naast mijn technische vaardigheden heb ik mijn communicatieve vaardigheden enorm verbeterd. Ik heb veel nieuwe en bijzondere datawetenschappers over de hele wereld ontmoet, en ik denk echt dat het voor mij een prestatie is om vrienden te maken die samenwerken.
De Omdena-gemeenschap was het beste waar ik ooit om had kunnen vragen. Ik heb met veel changemakers kunnen communiceren, waar ik verschillende dingen heb geleerd en onderzocht die zonder de steun van de gemeenschap niet mogelijk waren geweest. Leren van elkaars ervaring en kennis is de meest cruciale factor als het gaat om teambuilding. Het beste was dat alle medewerkers hun ervaring en kennis heel vastberaden en positief deelden over een bepaalde taak. Het project had zulke uiteenlopende mensen uit verschillende regio's over de hele wereld, maar ze waren allemaal verenigd als een team.

Concluderend zou ik willen zeggen dat ik het erg leuk vond om deel uit te maken van dit team en dat ik begreep dat gemeenschapsopbouw net zo belangrijk is als het leren van technische dingen, om het teamwerk succesvol te maken!
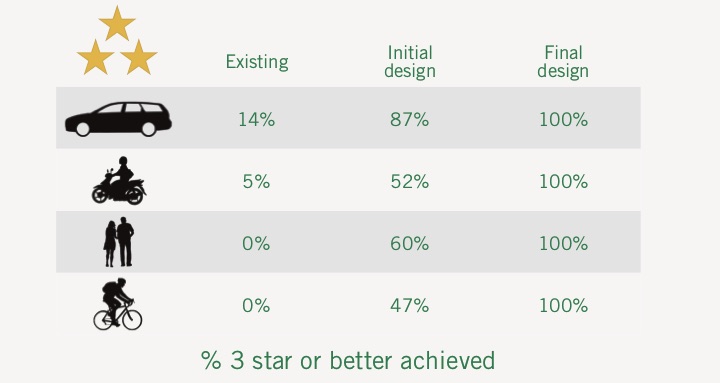
#gemeenschap #aiforgood #roadsafety #computervision #samen levens redden #3starsorbbetter
Onze oprechte dank aan Rutuja en het iRAP Omdena Challenge-team! Sluit je aan bij toekomstige Omdena-projecten hier.