Vandaag kwamen ruim 250 deelnemers virtueel samen in een bijzondere conferentie van de CEF SLAIN-project resultaten gewijd aan de ''Weginfrastructuurvereisten voor geconnecteerde en autonome voertuigen (CAV)''.
Mevrouw Lina Konstantinopoulou, secretaris-generaal van EuroRAP en de projectcoördinator van SLAIN openden de conferentie en verklaarden: ‘Ik hoop echt dat deze resultaten kunnen bijdragen aan de lopende werkzaamheden van het DG MOVE CCAM-partnerschap, het VN-Verdrag inzake wegverkeer en verkeerstekens en signalen en de VN-werkgroep voor geautomatiseerde/autonome en Verbonden voertuigen (GRVA). Ons doel is het langetermijndoel van de Europese Commissie, om dichter bij nul sterfgevallen te komen (“Vision Zero”).
EuroRAP is de hoofdpartner van Project SLAIN (Saving Lives Assessing and Improving TEN-T road Network safety), gefinancierd door de Connecting Europe Facility van de Europese Commissie, beheerd door INEA. Het project heeft tot doel de veiligheid van de weginfrastructuur op Europese TEN-T-wegen te verbeteren door middel van risicobeoordeling. SLAIN omvat onder meer de beoordeling van wegen op hun geschiktheid voor CAV's.
Tijdens zijn welkomstnota presenteerde Geert van der Linden, beleidsmedewerker bij EC DG MOVE het Europese partnerschap op het gebied van CCAM en de lopende werkzaamheden van CCAM Platform WG3 Fysieke en Digitale Infrastructuur. CEF SLAIN Activiteit 7-resultaten werden gepresenteerd door FPZ University (Leonid Ljubotina, SLAIN-partner), SLAIN CAV-leesbaarheidspilotresultaten uit de 4 lidstaten door ANDITI (Peter Jamieson).
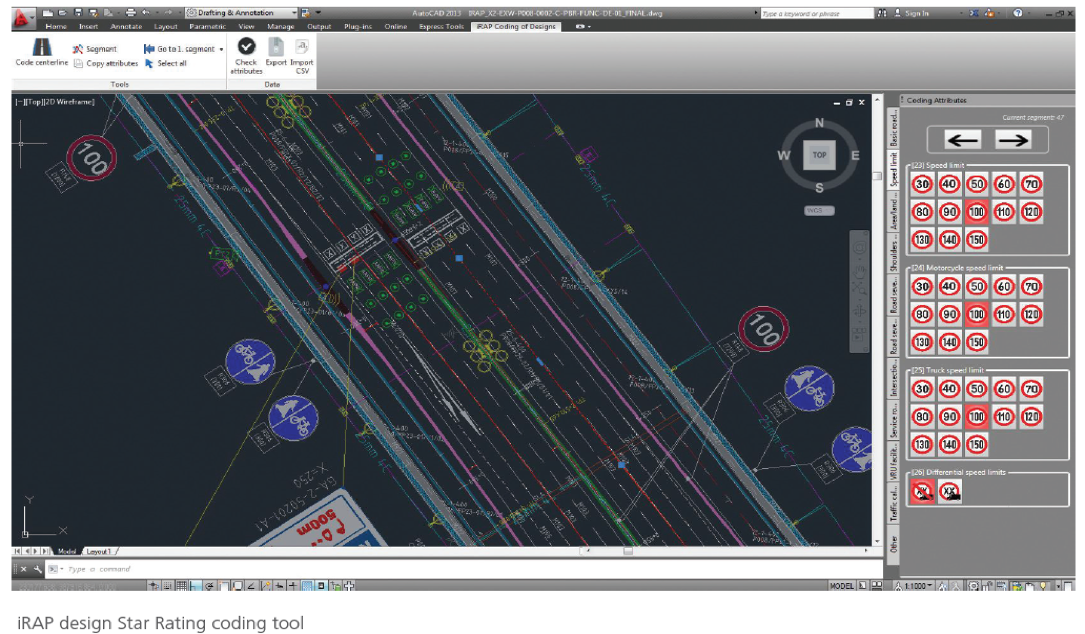
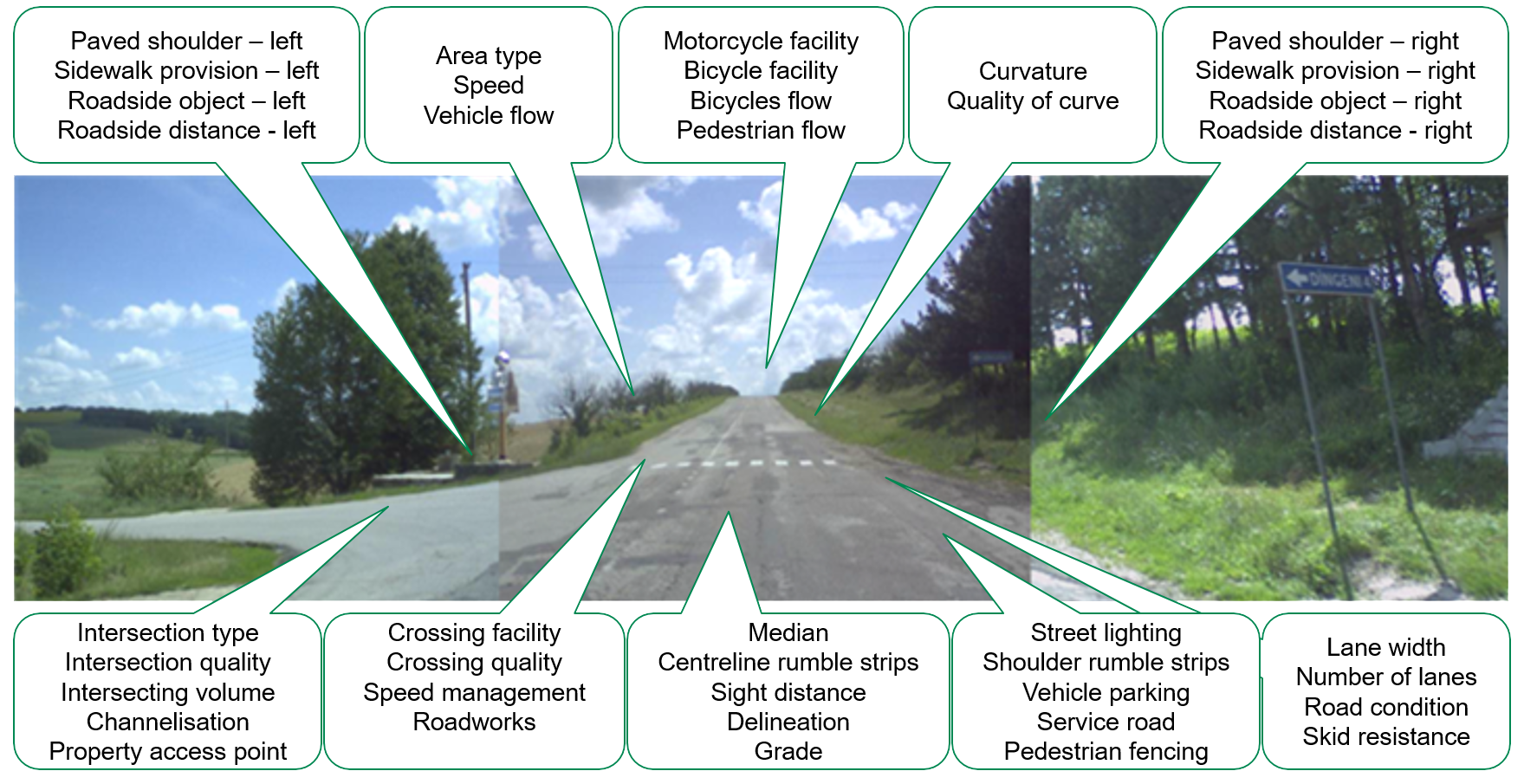
Leonid Ljubotina, FPZ Universiteit zei: ''State-of-the-art bevestigt opnieuw dat wegmarkeringen en verkeersborden niet de enige fysieke infrastructuurvereisten voor CAV's zijn. Alle iRAP-wegattributen zoals rijbaan, wegomgeving, ernst langs de weg, voorzieningen voor VRUS, verkeerslichten, snelheid en hun digitale weergave via HD-kaarten zijn relevant voor CAV-detectie en -perceptie, sensorfusie en AI-algoritmen, padplanning en bewegingscontrole ''.
In het kader van de doelstellingen van dit project was het de bedoeling om gegevens en in het bijzonder parameters (specificaties) te verzamelen voor het meten en vastleggen van fysieke wegkenmerken, met name wegmarkeringen/lijnen en bewegwijzering, voor CAV-gereedheid uit een steekproef van 2.000 km TEN-T-wegen in 4 verschillende landen – Kroatië, Griekenland, Italië en Spanje. Dit werk werd uitgevoerd met de steun van het samenwerkingspartnerschap van Anditi, TomTom, Tutela en Factual Consulting.
Arnout Desmet, VP Maps, TomTom zei: “We zijn erg blij om samen te werken met EuroRAP, Anditi en anderen aan het SLAIN-project. Het is door middel van dergelijke projecten dat we de waarde van onze locatietechnologieën kunnen demonstreren en dichter bij TomTom's visie van een veilige en autonome wereld kunnen komen.”
Ana Blanco Bergareche, adjunct-adjunct-directeur voor Mobiliteit, Directoraat-Generaal Verkeer (DGT) zei: ''DGT Spanje is erg blij een SLAIN-partner te zijn en de recente resultaten bevestigen onze voortdurende inzet om veiligere wegen voor CAV's te hebben''.
Rob McInerney, CEO van IRAP presenteerde het Ai-RAP Innovation Framework en voegde daaraan toe 'fysieke, digitale en operationele infrastructuurvereisten voor CAV zullen een complementaire benadering van financiering en investeringen door wegbeheerders noodzakelijk maken. Daarvoor hebben we een geharmoniseerd raamwerk nodig voor de beoordeling van de verkeersveiligheid en de gereedheid van de infrastructuur voor CAV's om de haalbaarheid van langetermijninvesteringsbeslissingen te overwegen.'' zei Rob McInerney.
Een panelrondetafelgesprek onder leiding van Lina Konstantinopoulou, secretaris-generaal van EuroRAP, werd afgetrapt met belangrijke panelleden van TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) en de Nationale Wegautoriteiten, Ministerie van Infrastructuur en Transport, GRIEKENLAND (Ioannis Matsas), Attikes Diadromes GRIEKENLAND (Giorgos Kiousis), Anas ITALIË (Luigi Carrarini), DGT SPANJE (Ana Blanco Bergareche) in een levendige discussie over de toekomstige strategische richtingen op het gebied van de wegeninfrastructuurvereisten voor geconnecteerde en autonome voertuigen”.\
De bevindingen van de CEF SLAIN-activiteit 7 zullen aanbevelingen en toekomstige richtingen bieden voor het verbeteren van de leesbaarheid en detecteerbaarheid voor zowel menselijke bestuurders als geautomatiseerde rijhulpsystemen, wat momenteel een van de vereisten is van de wijzigingen van Richtlijn 2008/96/EG inzake het beheer van de veiligheid van weginfrastructuur en de huidige discussies van het Coöperatieve, geconnecteerde en geautomatiseerde mobiliteitsplatform (CCAM) van de Europese Commissie voeden. Op mondiaal niveau zullen de resultaten bijdragen aan het VN-Verdrag inzake wegverkeer en verkeerstekens en -signalen en de VN-werkgroep voor geautomatiseerde/autonome en verbonden voertuigen (GRVA).
Links naar de twee rapporten kunnen worden opgehaald uit:
- D7.1 SLAIN Leverbaar – Kwaliteit van horizontale en verticale borden
- D7.2 SLAIN Deliverable – Andere initiatieven om aan de behoeften van geautomatiseerde auto’s te voldoen
Begunstigden: