Hoy, más de 250 participantes se reunieron virtualmente en una conferencia especial del Proyecto CEF SLAIN resultados dedicados a los '' Requisitos de infraestructura vial para vehículos conectados y autónomos (CAV) ''.
Sra. Lina Konstantinopoulou, Secretaria General de EuroRAP y el coordinador del proyecto SLAIN abrieron la conferencia y declararon: `` Realmente espero que estos resultados puedan contribuir al trabajo en curso de la asociación DG MOVE CCAM, la Convención de las Naciones Unidas sobre el tráfico y las señales y señales viales y el Grupo de trabajo de las Naciones Unidas sobre sistemas automatizados / autónomos y Vehículos conectados (GRVA). Nuestro objetivo es el objetivo a largo plazo de la Comisión Europea, acercarnos a cero muertes por ("Visión Cero").
EuroRAP es el socio principal del Proyecto SLAIN (Salvando vidas, Evaluación y mejora de la seguridad de la red de carreteras TEN-T) financiado por el Mecanismo Conectar Europa de la Comisión Europea gestionado por INEA. El proyecto tiene como objetivo mejorar la seguridad de la infraestructura vial en las carreteras europeas RTE-T mediante la evaluación de riesgos. Entre sus actividades, SLAIN engloba la evaluación de carreteras en cuanto a su preparación para CAV.
Durante su nota de bienvenida, Geert van der Linden, responsable de políticas de EC DG MOVE, presentó la Asociación Europea sobre CCAM y el trabajo en curso de la plataforma CCAM WG3 Infraestructura física y digital. Los resultados de la Actividad 7 de CEF SLAIN fueron presentados por la Universidad FPZ (Leonid Ljubotina, socio de SLAIN), los resultados piloto de legibilidad de SLAIN CAV de los 4 estados miembros por ANDITI (Peter Jamieson).
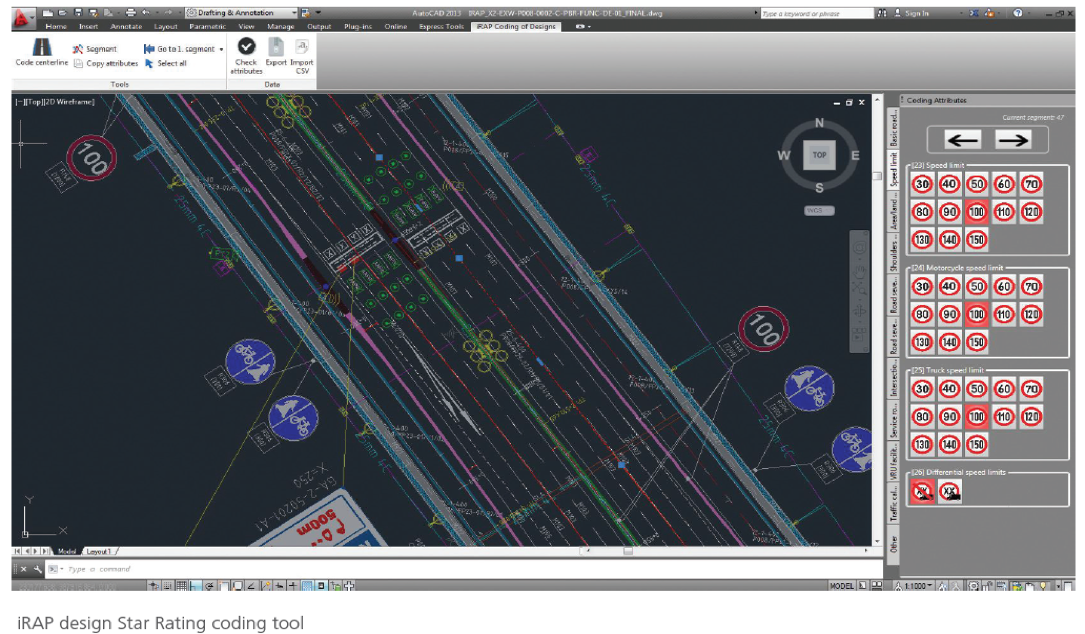
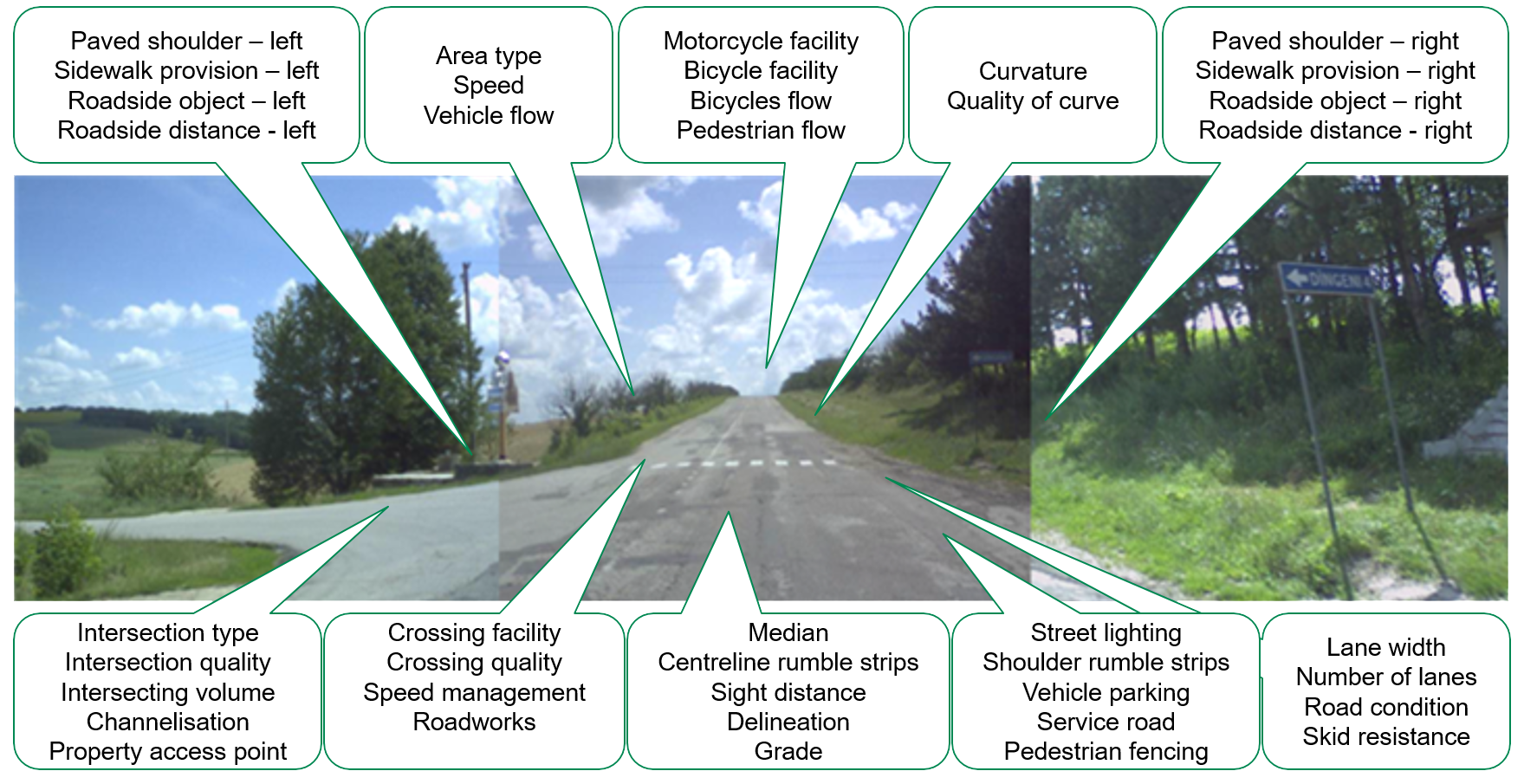
Leonid Ljubotina, FPZ University dijo ''El estado del arte reafirma que las marcas viales y las señales de tráfico no son los únicos requisitos de infraestructura física para los CAV. Todos los atributos de la carretera iRAP, como la carretera, el entorno de la carretera, la severidad de la carretera, las instalaciones para VRUS, los semáforos, la velocidad, así como su representación digital a través de mapas HD, son relevantes para la detección y percepción de CAV, la fusión de sensores y los algoritmos de IA, la planificación de la ruta y el control de movimiento. ''.
Bajo los objetivos de este proyecto, se planeó recolectar datos y en particular parámetros (especificaciones) para medir y registrar los atributos físicos de la carretera, específicamente las marcas / líneas y señalización vial, para la preparación CAV de una muestra de 2.000 Km de carreteras TEN-T. en 4 países diferentes: Croacia, Grecia, Italia y España. Este trabajo se realizó con el apoyo del Collaborative Partnership de Anditi, TomTom, Tutela y Factual Consulting.
Arnout Desmet, VP Maps, TomTom dijo: “Estamos muy contentos de asociarnos con EuroRAP, Anditi y otros en el proyecto SLAIN. Es a través de estos proyectos que podemos demostrar el valor de nuestras tecnologías de ubicación y acercarnos a la visión de TomTom de un mundo seguro y autónomo ”.
Ana Blanco Bergareche Subdirectora Adjunta de Movilidad de la Dirección General de Tráfico (DGT) dijo que `` la DGT España está muy contenta de ser socio de SLAIN y los resultados recientes confirman nuestro compromiso continuo de tener carreteras más seguras para las CAV ''.
Rob McInerney, CEO de IRAP presentó el Marco de Innovación Ai-RAP y agregó que 'Los requisitos de infraestructura física, digital y operativa para CAV requerirán un enfoque complementario al financiamiento y la inversión por parte de las autoridades viales. Para eso, necesitamos un marco armonizado para la evaluación de la seguridad vial para la preparación de la infraestructura para que las CAV consideren la viabilidad de las decisiones de inversión a largo plazo ''. Dijo Rob McInerney.
Se inició una mesa redonda moderada por Lina Konstantinopoulou, Secretaria General de EuroRAP, con panelistas clave de TomTom (Arnout Desmet), 3M (Rik Nuyttens), ACEA (Johannes Peter Bauer) y el Ministerio de Infraestructura y Transporte de las Autoridades de Carreteras Nacionales, GRECIA (Ioannis Matsas), Attikes Diadromes GRECIA (Giorgos Kiousis), Anas ITALIA (Luigi Carrarini), DGT ESPAÑA (Ana Blanco Bergareche) en un animado debate sobre las futuras orientaciones estratégicas sobre los requisitos de infraestructura vial para vehículos conectados y autónomos ”. \
Los resultados de la Actividad 7 de CEF SLAIN proporcionarán recomendaciones y direcciones futuras para mejorar la legibilidad y la detectabilidad tanto para los conductores humanos como para los sistemas automatizados de asistencia al conductor, que actualmente es uno de los requisitos de las Enmiendas a la Directiva 2008/96 / CE sobre gestión de la seguridad de la infraestructura vial. así como alimentar los debates actuales de la Plataforma de movilidad cooperativa, conectada y automatizada (CCAM) de la Comisión Europea. A nivel mundial, los resultados contribuirán a la Convención de las Naciones Unidas sobre Tráfico Vial y Señalización y Señalización Vial y al Grupo de Trabajo de las Naciones Unidas sobre Vehículos Automatizados / Autónomos y Conectados (GRVA).
Los enlaces a los dos informes se pueden obtener en:
- D7.1 Entregable SLAIN - Calidad de las señales horizontales y verticales
- D7.2 SLAIN Deliverable - Otras iniciativas para satisfacer las necesidades de los automóviles automatizados
Beneficiarios: