«Невероятные изменения происходят в вашей жизни, когда вы решаете взять под контроль то, над чем имеете власть, вместо того, чтобы жаждать контроля над тем, чего у вас нет.»- Стив Мараболи
Рутуджа Каваде, инженер машинного обучения в Омдене | AI на благо общества отражает medium.com на ее опыте работы над iRAP Omdena Challenge за последние месяцы: От сбора данных до EDA, маркировки и построения сложных моделей машинного обучения для оценки безопасности дорожного движения (с участием лучших специалистов по данным, инженеров по данным и экспертов по машинному обучению в мире):
Инновационный iRAP Omdena Challenge произошла в течение 8 недель с ноября 2020 года и привлекла более 50 инженеров по ИИ и машинному обучению, чтобы найти решение для ускоренного и интеллектуального сбора и кодирования данных атрибутов дорог (AiRAP) для спасения жизней.
Мне, как студенту бакалавриата, всегда было непросто управлять учеными с некоторыми внеклассными мероприятиями. Я всегда старался максимально использовать свободное время. Эта изоляция не была исключением. От обучения и изучения машинного обучения до выбора младшего инженера машинного обучения в проекте компьютерного зрения в Омдене и до повышения до инженера по машинному обучению к концу двух месяцев было очень примечательно.
Спасая жизни вместе
Последние два месяца не могли быть более продуктивными, чем совместная работа над проектом по безопасности дорожного движения с целью #savinglivestogether и работа с некоторыми из лучших инженеров машинного обучения со всего мира. Я рад, что завершил проект AI для безопасности дорожного движения к Омдена в сотрудничестве с iRAP. Проект стартовал в середине ноября 2020 года с участием 50 сменщиков по всему миру. 50 сменщиков #AI из 24 стран (33% женщины) объединились, чтобы начать программу RoadSafety Challenge с помощью iRAP.
Формулировка проблемы заключалась в предотвращении дорожных аварий и спасении жизней. Сама по себе задача очень увлекла меня, поэтому мне не терпелось приступить к делу.
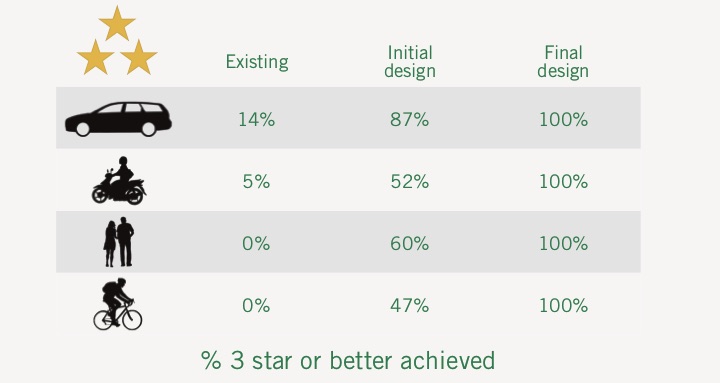
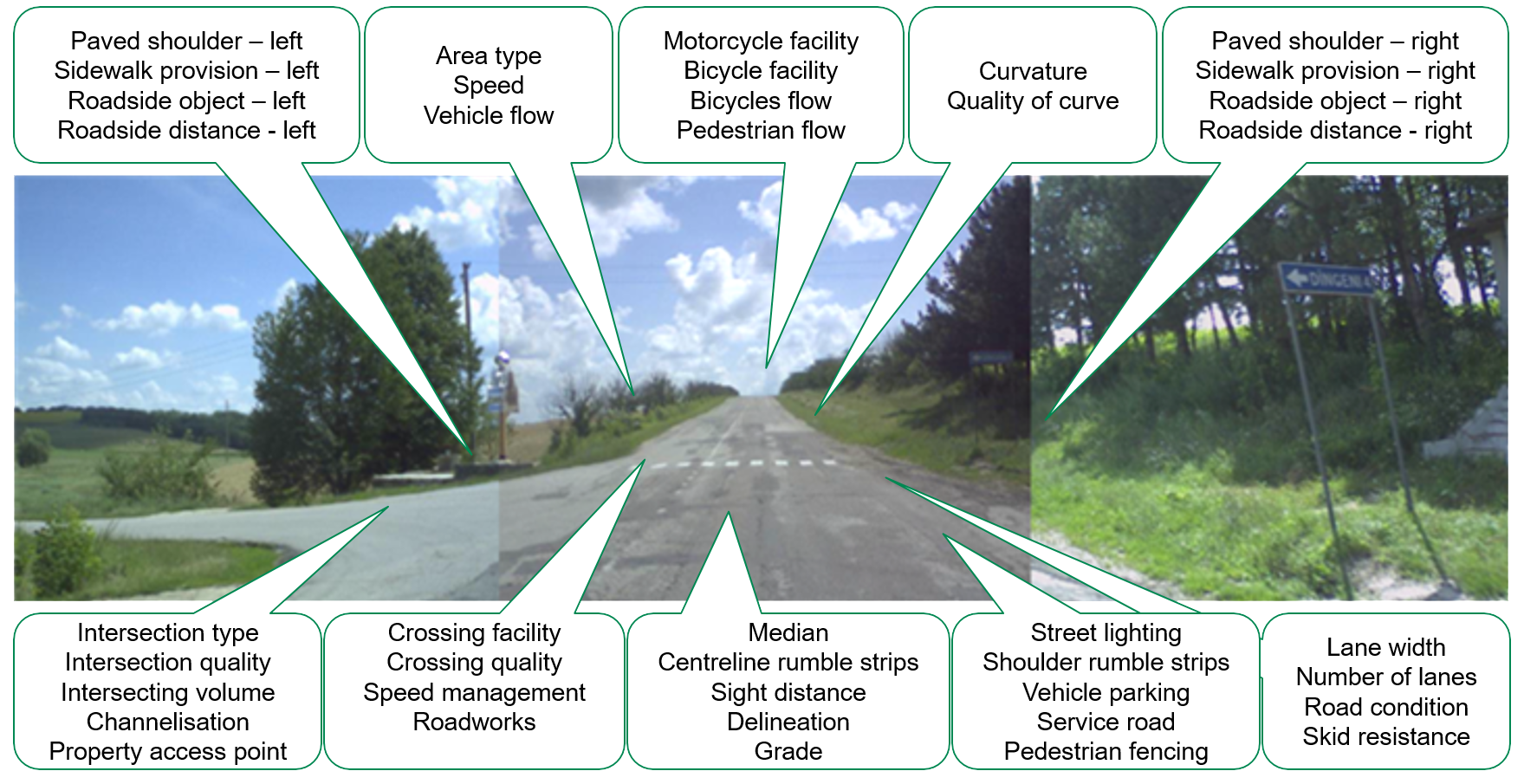
Наша задача состояла в том, чтобы составить карту риска столкновения на каждой дороге на земле для каждого типа участников дорожного движения; определить дизайн инфраструктуры, скорость и функции объема, которые влияют на этот риск, и регулярно собирать данные для обеспечения прозрачности, подотчетности, действий и отслеживания производительности.

Изображение дороги с помощью LiDAR (Источник: TomTom Dataset)
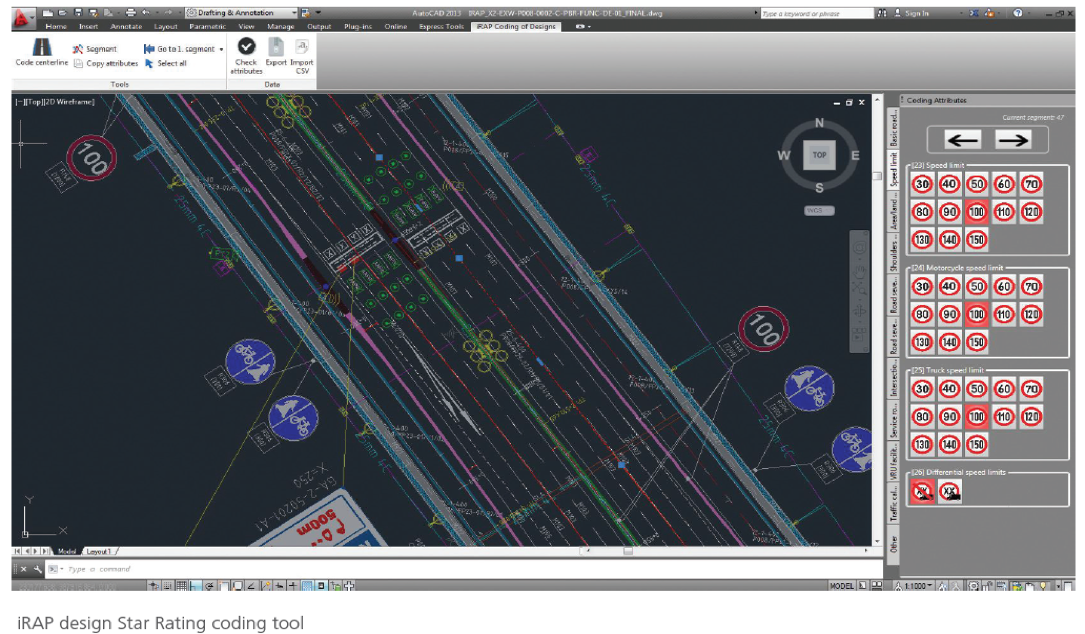
Проект сфокусирован на анализе данных и его возможностях, извлечении характеристик дороги из существующих данных, создании Карты рисков исторических аварий, аварий, совершенных для каждого участника дорожного движения, отображать показатели безопасности и решать Звездный рейтинг по нормам 1ТР4Т. Моя работа заключалась в создании моделей обнаружения объектов с помощью YOLO v3, open CV, Resnet и COCO.
От сбора данных до маркировки
Мне приходилось иметь дело с точностью каждого из них и с тем, как мы можем оптимизировать его, чтобы он соответствовал нашим данным. Я также работал с панорамными изображениями из TomTom набор данных. TomTom Historical Traffic Stats - это продукт самообслуживания, который анализирует исторические данные о местоположении и предоставляет информацию о скорости движения, времени в пути и размере выборки в дорожной сети. Он в основном содержал все реальные изображения дороги и движения.
Одно из изображений добавлено сюда. Мы выбрали этот набор данных, потому что в нем были LiDAR (обнаружение света и дальность), а также панорамные изображения, которые помогли нам проанализировать особенности дороги и освоиться с различными аспектами дороги, которые учитывает iRAP. Набор данных TomTom не был помечен, и наша команда пометила его в соответствии со стандартами iRAP примерно с 3964 изображениями (10,9 ГБ). Он включал панорамные изображения для ESP (Spain Road Images) и MEX (Mexico Road Images).

Панорамное изображение (Источник: TomTom Dataset)
Первой и самой большой проблемой с данными TomTom для меня была работа с большими данными и их обработка с помощью Amazon S3, чего я раньше не делал. Я получал хорошую поддержку сообщества, когда сталкивался с подобной проблемой. Лучше всего было то, что некоторые из других сотрудников были активны в любое время дня, с которыми я мог связаться.
Я вместе с командой вручную аннотировал изображения, и мы использовали инструмент маркировки (labelImg). Мы завершили аннотирование почти 2К изображений, снятых TomTom. Также у меня была возможность поработать над конвейером проекта с помощью Spell ML.
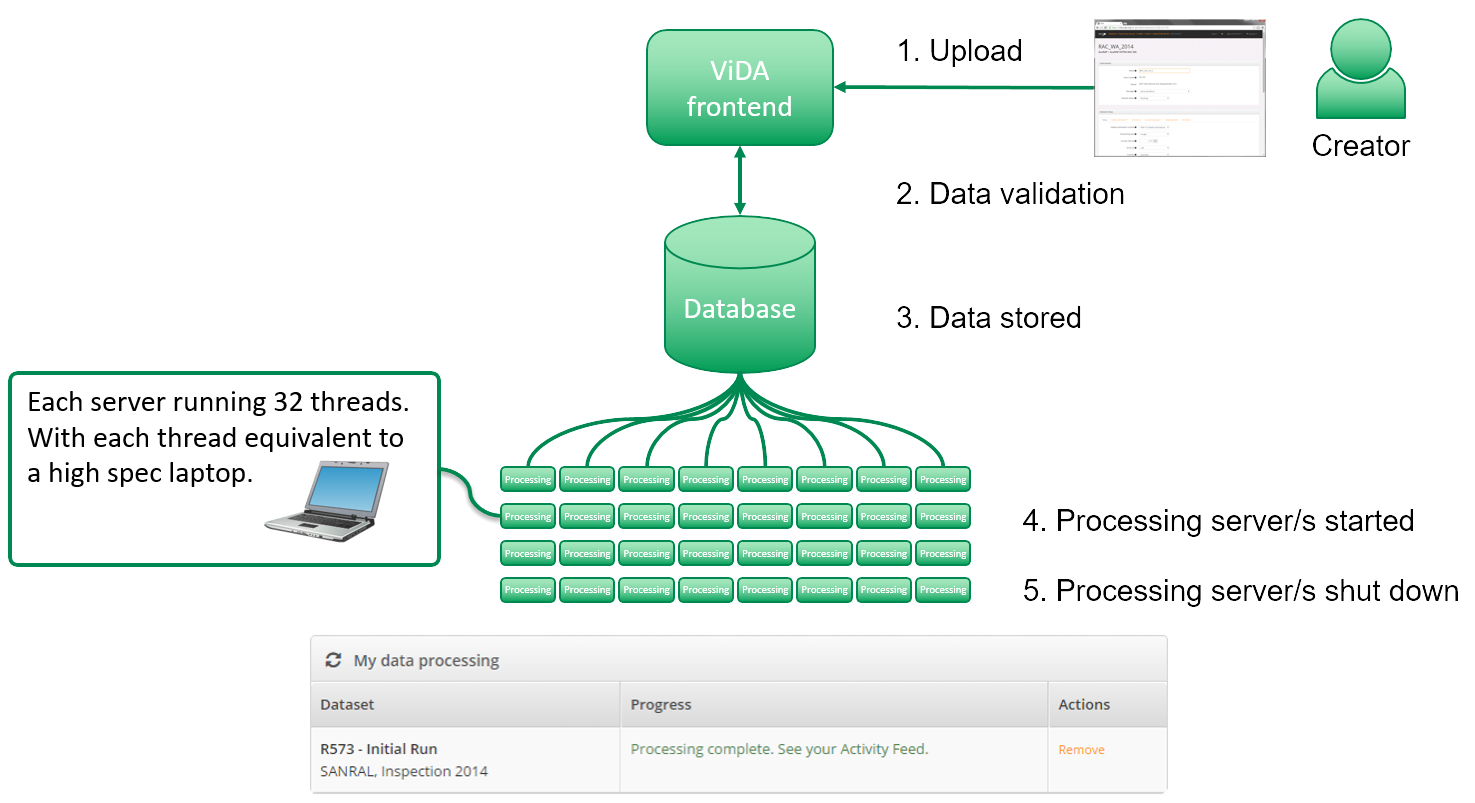
Spell ML - это платформа для создания проектов машинного обучения и управления ими. Обычно он используется для конвейерной обработки проектов машинного обучения. Наша команда использовала это программное обеспечение для конвейерной обработки работы каждого отдельного человека или небольшой группы, чтобы сделать ее окончательной частью.

Маркировка панорамных изображений с помощью программы LabelImg
Сообщество, помощь и призывы к спринту
У нас также было несколько спринтов кода и данных, в которых все сотрудники, работавшие над одной и той же частью, проводили интерактивный сеанс, в котором разрешались сомнения, помогали друг другу и действительно создавали сообщество.
Я особенно хотел бы упомянуть спринт аннотаций, когда все участники, участвующие в этой задаче, присоединились и обсудили маркировку, программное обеспечение, используемое для аннотирования изображений. Мы разделили изображения между собой и продолжили комментировать их. Этот спринт длился почти 8–10 часов, и каждый мог присоединиться и уйти в соответствии со своим часовым поясом. У нас также было несколько других встреч, на которых все делились своим статусом работы, своими сомнениями и трудностями, с которыми сталкивались в любой момент времени, и помогали друг другу, используя свои самые полные знания.
Хелен Келлер правильно сказала: «В одиночку мы можем сделать так мало; вместе мы можем так много сделать ».
У меня был большой опыт обучения и работы со всеми замечательными преобразователями, которые приложили все свои усилия, чтобы добиться этого. Помимо технических навыков, я значительно улучшил свои коммуникативные навыки. Мне довелось познакомиться со многими новыми и выдающимися учеными по данным со всего мира, и я искренне считаю, что найти друзей, работающих вместе, - это достижение для меня.
Сообщество Омдены было лучшим, о чем я когда-либо мог мечтать. Мне пришлось общаться со многими создателями перемен, где я узнал и исследовал разные вещи, которые были бы невозможны без поддержки сообщества. Изучение опыта и знаний друг друга - самый важный фактор, когда речь идет о построении команды. Лучше всего то, что все сотрудники делились своим опытом и знаниями, очень твердо и позитивно по каждой конкретной задаче. В проекте участвовали такие разные люди из разных регионов мира, но все они были объединены в одну команду.

В заключение, я бы сказал, что мне очень понравилось быть частью этой команды, и я понял, что создание сообщества так же важно, как и изучение технических вещей, чтобы сделать командную работу успешной!
#сообщество 1TP3Тайфоргуд 1TP3Безопасность на дорогах #компьютерное зрение #сохранение жизни вместе #3звезды или лучше
Наша искренняя благодарность Рутудже и команде iRAP Omdena Challenge! Присоединяйтесь к будущим проектам Omdena Вот.