
“Ocurre un cambio increíble en tu vida cuando decides tomar el control de aquello que puedes controlar en lugar de anhelar controlar lo que no puedes.”— Steve Maraboli
Rutuja Kawade, ingeniera de ML en Omdena | IA para el Bien Social reflexiona sobre medium.com en su experiencia trabajando en Desafío Omdena iRAP en los últimos meses: desde la recopilación de datos hasta el EDA, el etiquetado, la creación de sofisticados modelos de ML para evaluar la seguridad vial (con algunos de los mejores científicos de datos, ingenieros de datos y expertos en ML del mundo):
El innovador Desafío Omdena iRAP ocurrió durante 8 semanas a partir de noviembre de 2020 y reunió a más de 50 ingenieros de IA y aprendizaje automático para encontrar una solución para la recopilación y codificación acelerada e inteligente de datos de atributos de carreteras (AiRAPpara salvar vidas.
Siendo un estudiante de pregrado, siempre me ha resultado un desafío compaginar los estudios con algunas actividades extracurriculares. Siempre he intentado aprovechar al máximo mi tiempo libre. Este confinamiento no fue la excepción. Desde aprender y explorar Machine Learning hasta ser seleccionado como Ingeniero Junior de ML en un Proyecto de Visión Artificial en Omdena, hasta ascender a Ingeniero de Machine Learning al final de dos meses, fue algo muy destacable.
Salvando vidas juntos
Los últimos dos meses no podrían haber sido más productivos: he colaborado en un proyecto de seguridad vial con el lema «#savinglivestogether» y he trabajado con algunos de los mejores ingenieros de aprendizaje automático de todo el mundo. Estoy encantado de haber completado el proyecto de inteligencia artificial para la seguridad vial mediante Omdena en colaboración con iRAP. El proyecto se puso en marcha a mediados de noviembre de 2020 con 50 agentes del cambio de todo el mundo. 50 agentes del cambio de #AI procedentes de 24 países (33% de ellas mujeres) se unen para dar el pistoletazo de salida al RoadSafety Challenge con iRAP.
El enunciado del problema era "Prevenir accidentes de tráfico y salvar vidas". El desafío en sí me fascinó mucho, por lo que estaba ansioso por empezar.
Nuestro problema era mapear el riesgo de accidentes en cada carretera del planeta para cada tipo de usuario de la carretera; identificar las características de diseño de la infraestructura, la velocidad y el volumen que influyen en ese riesgo, y producir los datos regularmente para impulsar la visibilidad, la rendición de cuentas, la acción y el seguimiento del rendimiento.
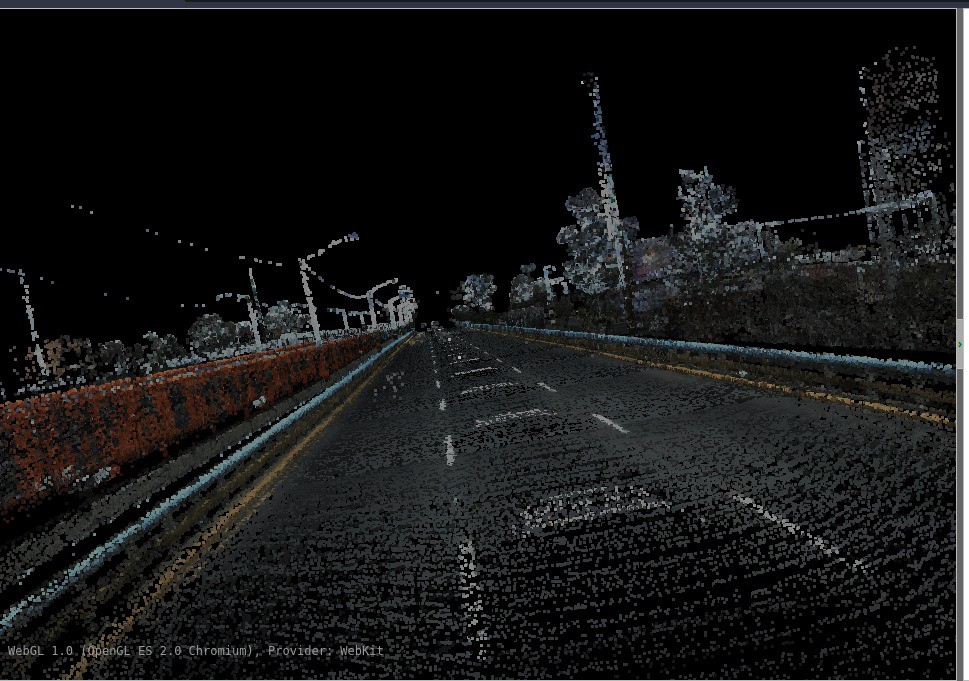
Imagen LiDAR de carretera (Fuente: Conjunto de datos de TomTom)
El proyecto se centró en el análisis de datos y sus posibilidades, la extracción de características de carreteras a partir de datos existentes, produciendo Mapas de riesgo de los accidentes históricos, accidentes ocurridos para cada usuario de la vía, mapear el desempeño de seguridad y lidiar con Calificación con estrellas de acuerdo con los estándares iRAP. Mi trabajo consistió en desarrollar modelos de detección de objetos con YOLO v3, OpenCV, ResNet y COCO.
De la Recopilación de Datos al Etiquetado
Tuve que lidiar con la precisión de cada uno y cómo podemos optimizarla para que se ajuste correctamente a nuestros datos. También trabajé con imágenes panorámicas de TomTom dataset. TomTom Historical Traffic Stats es un producto de autoservicio que analiza datos históricos de ubicación y proporciona información sobre el tráfico en cuanto a velocidad, tiempo de viaje y tamaño de la muestra en la red vial. Básicamente contenía todas las imágenes del mundo real de carreteras y tráfico.
Aquí se incluye una de las imágenes. Elegimos este conjunto de datos porque contaba con datos LiDAR (Light Detection and Ranging), así como con imágenes panorámicas, lo que nos ayudó a analizar las características de la carretera y a familiarizarnos con diversos aspectos de la misma que iRAP tiene en cuenta. El conjunto de datos de TomTom no estaba etiquetado, por lo que nuestro equipo lo etiquetó según los estándares de iRAP con unas 3.964 imágenes (10,9 GB). Incluía imágenes panorámicas de ESP (imágenes de carreteras de España) y MEX (imágenes de carreteras de México).

Imagen panorámica (Fuente: Conjunto de datos de TomTom)
El primer y principal desafío con los datos de TomTom para mí fue lidiar y manejar los big data usando Amazon S3, algo que no había hecho antes. Recibí un buen apoyo de la comunidad cada vez que me quedé atascado con algún problema de este tipo. Lo mejor fue que algunos de los otros colaboradores estaban activos en Slack en cualquier momento del día, a quienes podía contactar.
Yo, junto con el equipo, anoté las imágenes manualmente y utilizamos una herramienta de etiquetado (labelImg). Completamos la anotación de casi 2K imágenes capturadas por TomTom. Además, tuve la oportunidad de trabajar en el pipeline del proyecto utilizando Spell ML.
Spell ML es una plataforma para construir y gestionar proyectos de aprendizaje automático. Generalmente se utiliza para la canalización de proyectos de aprendizaje automático. Nuestro equipo utilizó este software para canalizar el trabajo de cada individuo o grupo pequeño para convertirlo en la pieza final completa.

Etiquetado de imágenes panorámicas usando el software LabelImg
La Comunidad, la Ayuda y las Llamadas de Sprint
También tuvimos algunas sesiones de código y sesiones de datos donde todos los colaboradores que trabajaban en la misma parte tenían una sesión interactiva para resolver dudas, ayudarse mutuamente y, de hecho, construir una comunidad.
Me gustaría mencionar especialmente el sprint de anotación, donde todos los colaboradores involucrados en esta tarea se unieron y discutieron el etiquetado, el software utilizado para anotar imágenes. Dividimos las imágenes entre nosotros y continuamos anotándolas. Este sprint duró casi 8-10 horas, donde todos eran libres de unirse y salir según su zona horaria. También tuvimos varias otras reuniones donde todos compartieron su estado de trabajo, sus dudas y las dificultades que enfrentaron en cualquier momento, y se ayudaron mutuamente con todo su conocimiento.
Con razón dijo Helen Keller: “Solos, podemos hacer tan poco; juntos, podemos hacer tanto”.”
Tuve una gran experiencia de aprendizaje y trabajo con todos los increíbles agentes de cambio que pusieron todo su esfuerzo para lograr esto. Aparte de mis habilidades técnicas, mejoré enormemente mis habilidades de comunicación. Tuve la oportunidad de conocer a muchos científicos de datos nuevos y extraordinarios de todo el mundo, y creo sinceramente que hacer amigos trabajando juntos es un logro para mí.
La comunidad Omdena fue lo mejor que podría haber pedido. Pude comunicarme con muchos agentes de cambio, donde aprendí y exploré diferentes cosas que no habrían sido posibles sin el apoyo de la comunidad. Aprender de la experiencia y el conocimiento de los demás es el factor más crucial cuando se trata de la formación de equipos. Lo mejor fue que todos los colaboradores compartieron su experiencia y conocimiento, muy firmemente y positivamente sobre cualquier tarea en particular. El proyecto contó con personas tan diversas de diferentes regiones del mundo, pero todos estuvieron unidos como equipo.
Para concluir, diría que disfruté mucho ser parte de este equipo y comprendí que la creación de comunidad es tan importante como el aprendizaje de cosas técnicas para que el trabajo en equipo sea exitoso.
#comunidad #porunbiencomún #seguridadvial #visiónartificial #salvemosvidasjuntos #3estrellasomás
¡Nuestro más sincero agradecimiento a Rutuja y al equipo del iRAP Omdena Challenge! Únete a los futuros proyectos de Omdena aquí.